

Kinematic study of Stewart platform based on dual quaternion method
-
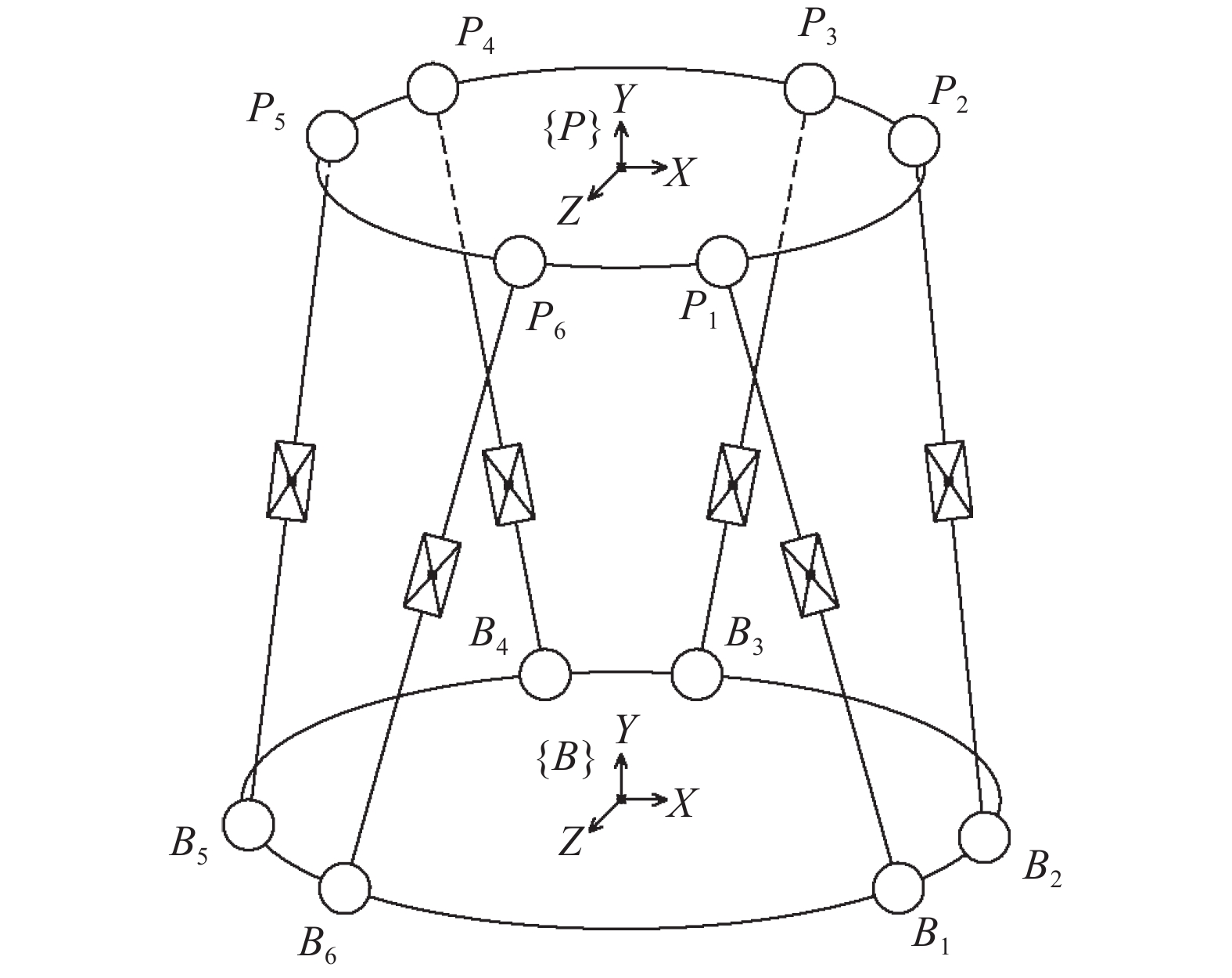
摘要: 作为一种多自由度并联机构,Stewart平台在工业自动化、飞行模拟及医疗设备等领域具有广阔应用前景。研究Stewart平台的运动学特性,并提供数学模型和解决方法,可以实现对其运动和位置的准确控制。基于6-UPS型Stewart并联机器人平台,引入了对偶四元数的概念,探讨了Stewart平台的运动学特性,提出了一种高效的并联机器人运动学求解算法。研究结果表明,在描述并联机器人的运动学中,对偶四元数法具有更简洁的表示形式和更少的用来表示刚体位姿的未知数个数,具有明显优势。Abstract: The Stewart platform, as a multi-degree-of-freedom parallel mechanism, is promising for a wide range of applications in industrial automation, flight simulation, and medical devices. Studying the kinematic characteristics of the Stewart platform and providing mathematical models and solution methods can achieve accurate control of its motion and position. In this paper, based on the 6-UPS-type Stewart parallel robot platform, the concept of dual quaternion is introduced, the kinematic properties of the Stewart platform are explored, and an efficient solution algorithm for parallel robot kinematics is proposed. The results show that in describing the kinematics of parallel robots, the dual quaternion method has a clear advantage with a more concise representation and fewer numbers of unknowns used to represent the rigid-body poses.
-
Key words:
- Stewart platform /
- parallel robot /
- kinematic /
- dual quaternion
-
[1] 杜平. Stewart平台运动学分析与仿真研究[J]. 机械研究与应用,2012,120(4): 19-22. doi: 10.3969/j.issn.1007-4414.2012.04.008 [2] STEWART D. A platform with six degrees of freedom[J]. Proceedings of the Institution of Mechanical Engineers,1965,180(1): 371-386. doi: 10.1243/PIME_PROC_1965_180_029_02 [3] DASGUPTA B,MRUTHYUNJAYA T S. The Stewart platform manipulator:a review[J]. Mechanism and Machine Theory,2000,35(1): 15-40. doi: 10.1016/S0094-114X(99)00006-3 [4] 方义圣. 六自由度并联脊柱手术机器人的设计与优化[D]. 上海: 上海应用技术大学, 2021. [5] 钱承,鄂加强,刘明,等. Stewart六自由度并联平台动力学模型振动分析[J]. 湖南大学学报(自然科学版),2016,43(2): 36-42. [6] CHEN Q C,ZHU S Q,ZHANG X Q. Improved in verse kinematics algorithm using screw theory for a six-DOF robot manipulator[J]. International Journal of Advanced Robotic Systems,2015,12(10): 1-9. [7] 潘菲,朱宏玉. 航天器非奇异自适应终端滑模姿轨联合控制[J]. 北京航空航天大学学报,2020,46(7): 1354-1362. [8] BRODSKY V,SHOHAM M. Dual numbers representation of rigid body dynamics[J]. Mechanism & Machine Theory,1999,34(5): 693-718. doi: 10.1016/S0094-114X(98)00049-4 [9] 李荣成. 基于对偶数的分布式多体系统动力学建模方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2021. [10] MERLET J P. Jacobian,manipulability,condition number and accuracy of parallel robots[J]. Journal of Mechanical Design,2006,128(1): 199-206. doi: 10.1115/1.2121740 [11] 葛为民,宇旭东,王肖锋,等. 基于对偶四元数的机械臂运动学建模及分析[J]. 机械传动,2018,42(7): 112-117. [12] 杨小龙. 六自由度并联机器人运动学、动力学与主动振动控制研究[D]. 南京: 南京航空航天大学, 2018. -

 下载:
下载:
 点击查看大图
点击查看大图
图(1)
计量
- 文章访问数: 46
- HTML全文浏览量: 27
- PDF下载量: 8
- 被引次数: 0



 地址:上海市漕宝路120号
地址:上海市漕宝路120号 电话:021-64691562
电话:021-64691562  邮箱:
邮箱: 版权所有:《应用技术学报》编辑部
版权所有:《应用技术学报》编辑部